Actuatoren zijn onderdelen die iets laten bewegen of zichtbaar maken.
In dit robotproject gebruiken we onder andere:
leds (licht)
motoren (beweging)
grijparmen (servo)
De micro:bit stuurt actuatoren aan via pins zoals P0, P1 en P2.
Led aansturen¶
Een led is de eenvoudigste actuator. Hij kan alleen:
aan
uit
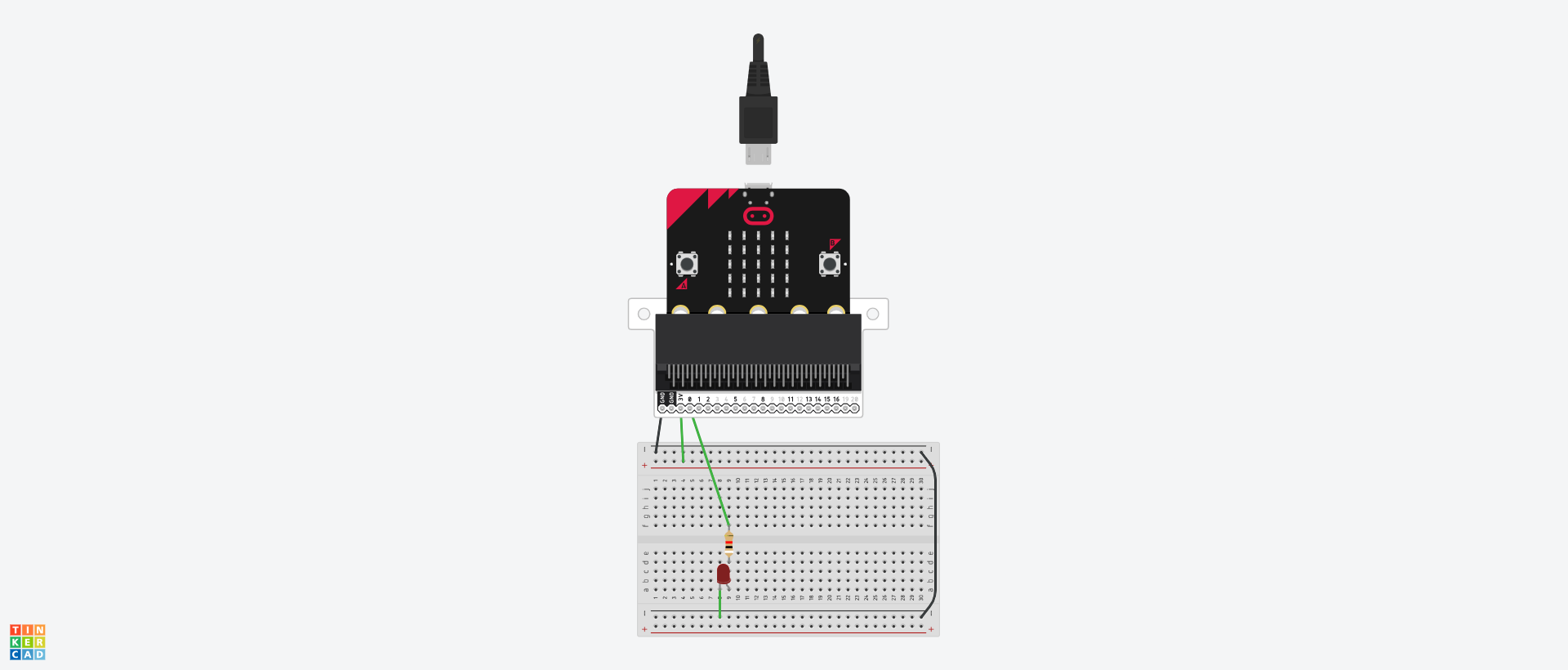
Hoe sluit je een led goed aan?¶
Een led werkt maar in één richting.
Daarom moet je goed opletten welke kant naar plus en welke kant naar min (GND) gaat.
Een led moet altijd via een weerstand worden aangesloten.
Zonder weerstand kan de led kapot gaan.
Aansluiten:
P0 → weerstand → led → GND
Welke kant van een led is plus en min?¶
Je kunt dit op drie manieren herkennen:
| kenmerk | betekenis |
|---|---|
| lange poot | plus (anode) |
| korte poot | min (kathode) |
| platte rand van de led | min (kathode) |
Vuistregel:
lange poot → via weerstand naar pin
platte kant → naar GND
Dus meestal sluit je een led zo aan:
pin → weerstand → lange poot led platte kant led → GND
Waarom moet een led de juiste richting hebben?¶
Een led is een diode.
Dat betekent dat stroom er maar in één richting doorheen kan lopen.
Als je hem omdraait:
gaat de led niet branden
maar meestal gaat hij niet kapot (als je een weerstand gebruikt)
Altijd een weerstand gebruiken¶
Een led moet altijd via een weerstand worden aangesloten.
Zonder weerstand kan:
de led kapot gaan
of de micro:bit beschadigd raken
Gebruik daarom altijd:
pin → weerstand → led → GND
Werkt de led niet?¶
Controleer dan:
zit de platte kant aan GND?
zit er een weerstand in de schakeling?
zit de led goed in het breadboard?
gebruik je de juiste pin in je programma?
In veel gevallen hoef je de led alleen even om te draaien.
Voorbeeldprogramma:¶
from microbit import *
# instellingen
LED_PIN = pin0
LED_AAN = 1
LED_UIT = 0
# programma
while True:
LED_PIN.write_digital(LED_AAN)Led bedienen met knop A en knop B:
from microbit import *
# instellingen
LED_PIN = pin0
LED_AAN = 1
LED_UIT = 0
# programma
while True:
if button_a.was_pressed():
LED_PIN.write_digital(LED_AAN)
if button_b.was_pressed():
LED_PIN.write_digital(LED_UIT)Motor aansturen¶
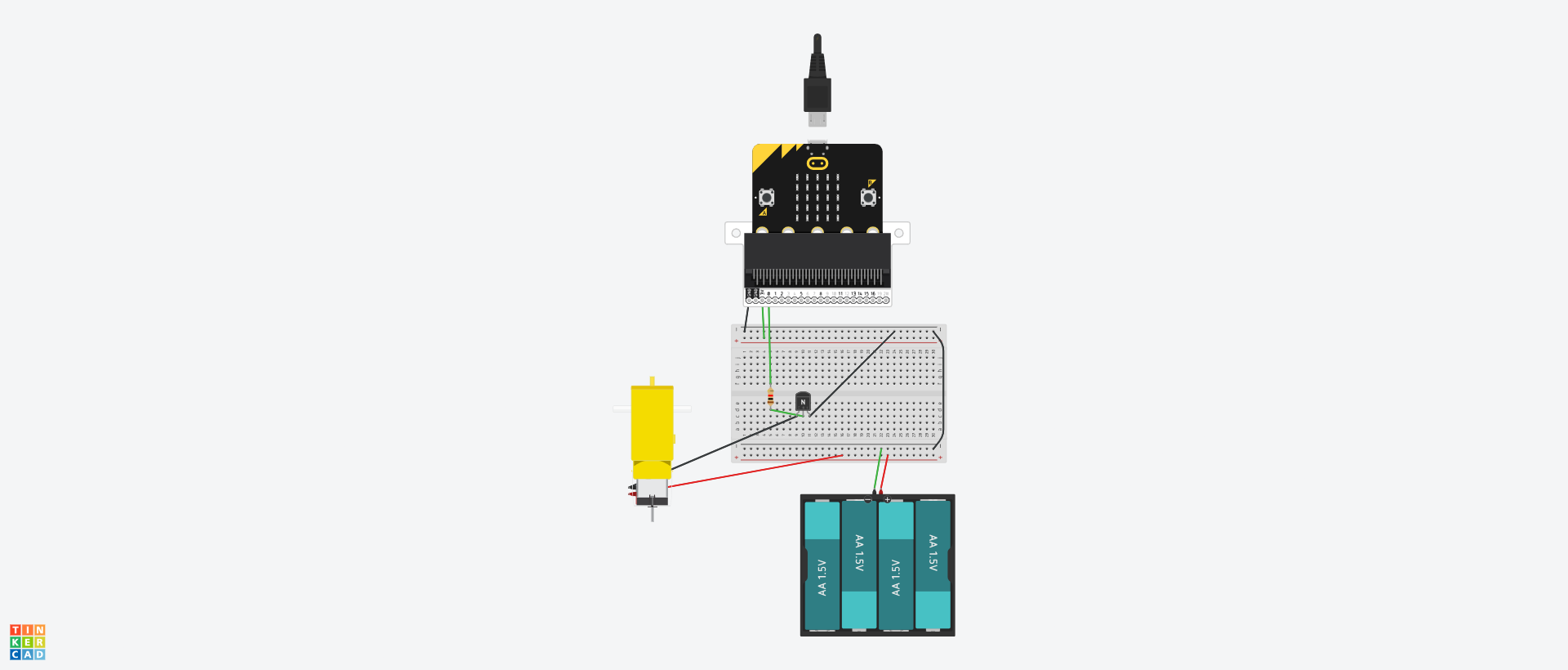
Een motor heeft meer stroom nodig dan de micro:bit kan leveren.
Daarom gebruik je:
een transistor
een externe batterij
De micro:bit stuurt de transistor aan.
De transistor schakelt vervolgens de motor.
Aansluiten (vereenvoudigd):
micro:bit → transistor → motor → batterij
De base mag niet rechtstreeks op de micro:bit worden aangesloten.
De weerstand:
beschermt de micro:bit
zorgt dat de transistor goed schakelt
Voorbeeldprogramma¶
from microbit import *
# instellingen
MOTOR_PIN = pin0
MOTOR_AAN = 1
MOTOR_UIT = 0
# programma
while True:
MOTOR_PIN.write_digital(MOTOR_AAN)Motor snelheid regelen (PWM):
from microbit import *
# instellingen
MOTOR_PIN = pin0
MOTOR_LANGZAAM = 300
MOTOR_SNEL = 700
# programma
while True:
MOTOR_PIN.write_analog(MOTOR_SNEL)Waarden liggen tussen:
0 – 1023
Dus:
lage waarde = langzaam
hoge waarde = snel
Grijparm aansturen (servo)¶
Een grijparm wordt meestal bestuurd met een servo-motor.
Een servo kan draaien naar een specifieke positie, bijvoorbeeld:
open
dicht
Servo aansluiten:
rood → 3V
zwart → GND
geel → P0
Voorbeeldprogramma:
from microbit import *
# instellingen
SERVO_PIN = pin0
GRIJPER_OPEN = 26
GRIJPER_DICHT = 77
# programma
SERVO_PIN.write_analog(GRIJPER_OPEN)Grijper bedienen met knop A en B:
from microbit import *
# instellingen
SERVO_PIN = pin0
GRIJPER_OPEN = 26
GRIJPER_DICHT = 77
# programma
while True:
if button_a.was_pressed():
SERVO_PIN.write_analog(GRIJPER_OPEN)
if button_b.was_pressed():
SERVO_PIN.write_analog(GRIJPER_DICHT)