Sensoren zijn onderdelen die informatie meten uit de omgeving. In dit robotproject gebruiken we sensoren om te bepalen wat de robot moet doen. Voorbeelden:
lichtsensor → meet hoe licht of donker het is
afstandssensor → meet hoe ver een object weg is
Sensoren sturen informatie naar de micro:bit. Dit noemen we input.
Digitale en analoge sensoren¶
Er zijn twee soorten signalen die sensoren kunnen geven.
Digitale sensoren¶
Digitale sensoren hebben maar twee waarden:
0 = geen signaal
1 = wel signaal
Bijvoorbeeld:een knop ingedrukt of niet.
Analoge sensoren¶
Analoge sensoren kunnen veel verschillende waarden geven. Bij de micro:bit liggen deze waarden tussen: 0 – 1023 Bijvoorbeeld:
hoe licht het is
hoe ver iets weg is De meeste sensoren in dit project gebruiken analoge signalen.
Lichtsensor uitlezen¶
Een lichtsensor meet hoeveel licht er op de sensor valt.
Meer licht → hogere waarde
Minder licht → lagere waarde
Voorbeeldprogramma:
from microbit import *
# instellingen
LICHT_SENSOR_PIN = pin1
# programma
while True:
lichtwaarde = LICHT_SENSOR_PIN.read_analog()
display.scroll(lichtwaarde)De micro:bit meet hier steeds hoeveel licht er binnenkomt en toont dit op het display.
Reageren op licht (beslissing maken)¶
Je kunt de robot laten reageren op licht.
Bijvoorbeeld:
bij weinig licht gaat een led aan.
from microbit import *
# instellingen
LICHT_SENSOR_PIN = pin1
LED_PIN = pin0
DONKER_DREMPEL = 400
LED_AAN = 1
LED_UIT = 0
# programma
while True:
lichtwaarde = LICHT_SENSOR_PIN.read_analog()
if lichtwaarde < DONKER_DREMPEL:
LED_PIN.write_digital(LED_AAN)
else:
LED_PIN.write_digital(LED_UIT)Hier bepaalt de variabele DONKER_DREMPEL wanneer het donker genoeg is.
Afstandssensor uitlezen¶
Een afstandssensor meet hoe ver een object van de robot staat.
Bijvoorbeeld:
dichtbij obstakel
ver weg van obstakel
Veel afstandssensoren geven een analoge waarde terug.
Voorbeeldprogramma:
from microbit import *
# instellingen
AFSTAND_SENSOR_PIN = pin2
# programma
while True:
afstandwaarde = AFSTAND_SENSOR_PIN.read_analog()
display.scroll(afstandwaarde)Hoe dichter een object bij de sensor komt, hoe meer de waarde verandert.
Let op:
de exacte betekenis van de waarde hangt af van het type sensor.
Reageren op afstand¶
De robot kan stoppen wanneer een object te dichtbij komt.
from microbit import *
# instellingen
AFSTAND_SENSOR_PIN = pin2
MOTOR_PIN = pin0
OBSTAKEL_DREMPEL = 500
MOTOR_AAN = 1
MOTOR_UIT = 0
# programma
while True:
afstandwaarde = AFSTAND_SENSOR_PIN.read_analog()
if afstandwaarde > OBSTAKEL_DREMPEL:
MOTOR_PIN.write_digital(MOTOR_UIT)
else:
MOTOR_PIN.write_digital(MOTOR_AAN)Hier stopt de motor wanneer een obstakel dichtbij komt.
Sensorwaarden bekijken tijdens testen¶
Tijdens het bouwen is het handig om eerst alleen de sensorwaarde te bekijken.
Zo kun je bepalen welke drempelwaarde goed werkt:
from microbit import *
# instellingen
SENSOR_PIN = pin1
# programma
while True:
sensorwaarde = SENSOR_PIN.read_analog()
display.scroll(sensorwaarde)Test dit eerst voordat je beslissingen toevoegt aan je programma.
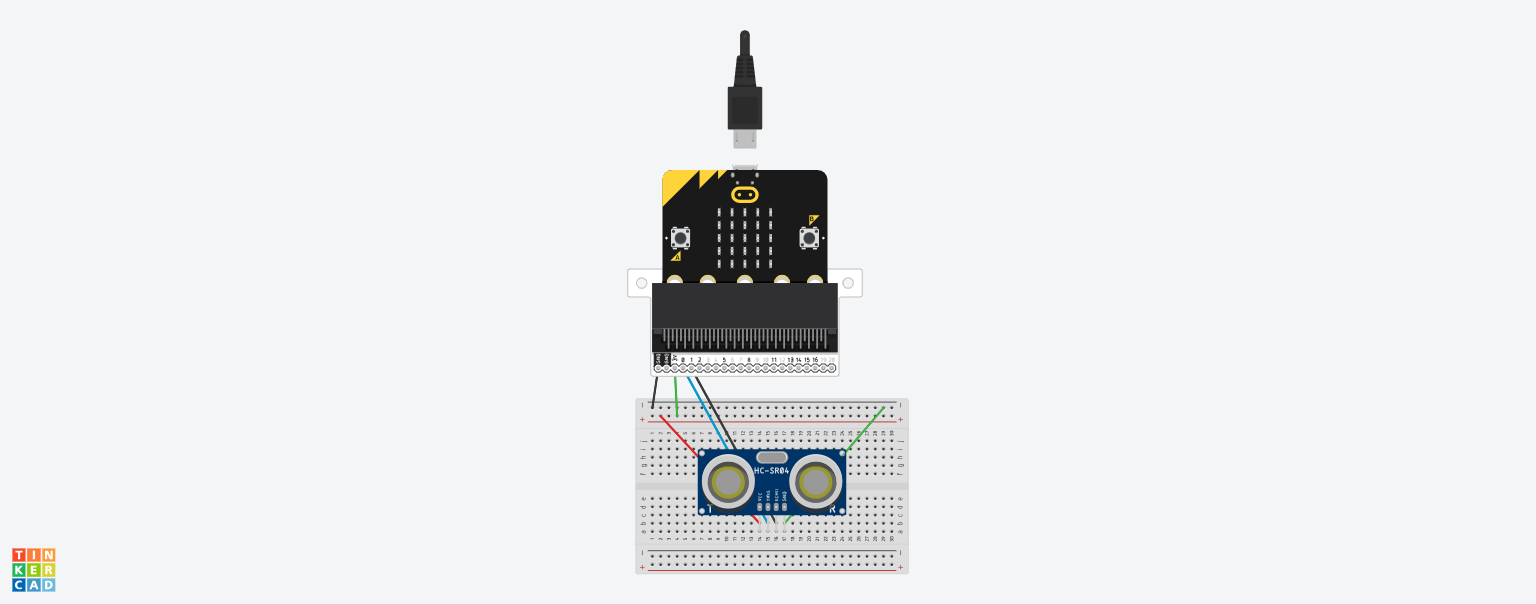
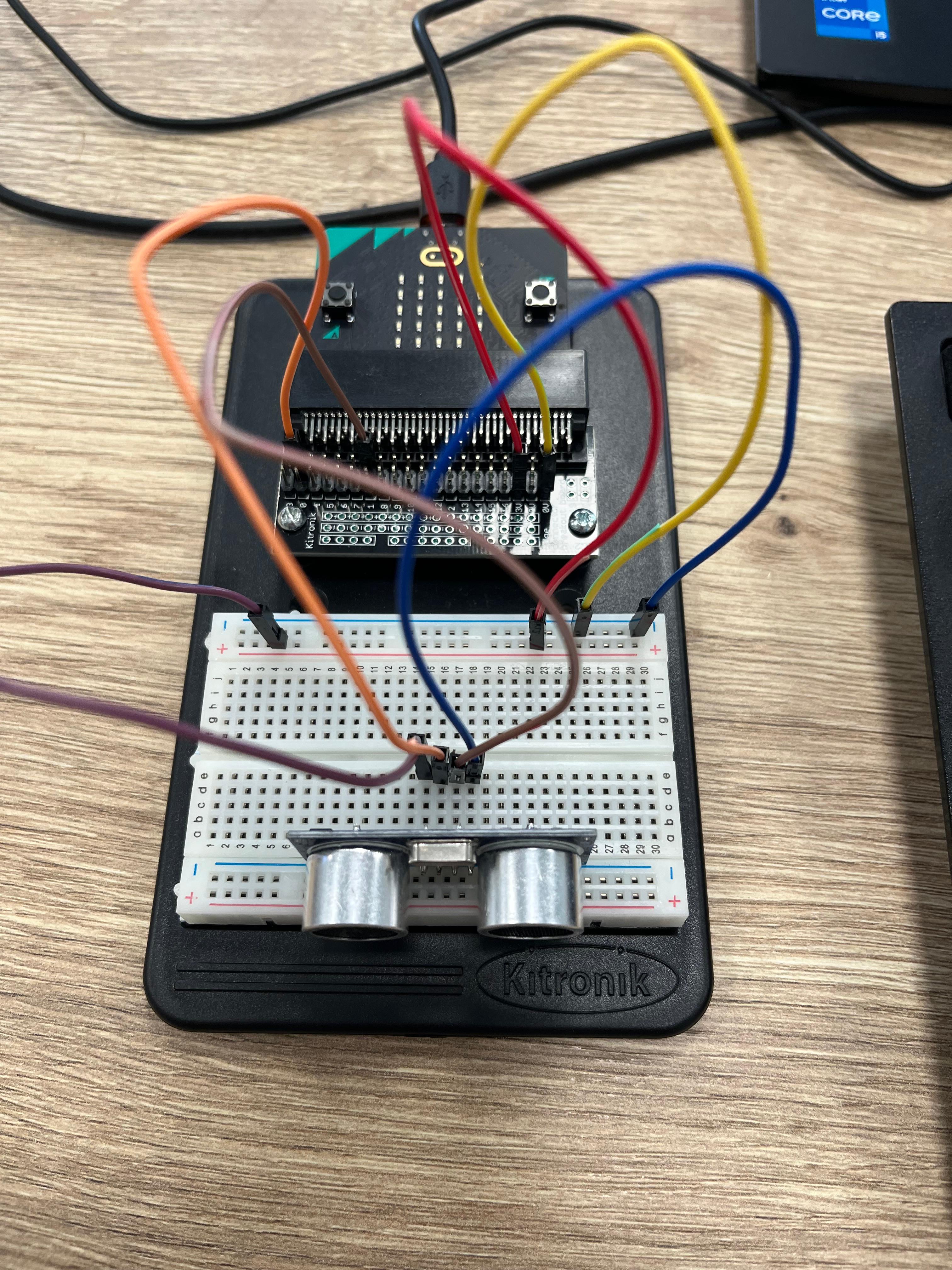
Ultrasone afstandssensor gebruiken¶
De ultrasone afstandssensor (met 4 pinnetjes) verzendt een ultrasoon geluid en meet de tijd totdat deze terugkomt. Door deze tijd om te rekenen kom je tot een aantal centimeters.
De 2 buitenste pinnen van de sensor zijn voor de GND en VCC, de binnenste voor de trigger (om het geluid te versturen) en de echo (om het geluid op te vangen).
from microbit import *
import machine
import utime
# Constants. Stel hier in welke pinnen je gebruikt.
SONAR_SIGNAL_PIN = pin0
SONOR_ECHO_PIN = pin1
# Variablen
def get_afstand():
# Berekent afstand in cm
SONAR_SIGNAL_PIN.write_digital(0) # Zet speaker sonar uit
utime.sleep_us(2) # Wacht 2 microseconden
SONAR_SIGNAL_PIN.write_digital(1) # Zet speaker sonar aan (verzend geluid)
utime.sleep_us(10) # Laat het geluid aan voor 10 microseconden
SONAR_SIGNAL_PIN.write_digital(0) # Zet speaker sonar uit
afstandtijd = machine.time_pulse_us(SONOR_ECHO_PIN,1,11600) # Meet tijd tot geluid wordt gemeten
afstand_cm = afstandtijd / 58 # Deel door 2 (heen en terug) en door snelheid geluid
return afstand_cm
# Hoofdprogramma
SONOR_ECHO_PIN.set_pull(SONOR_ECHO_PIN.NO_PULL)
while True:
if button_a.was_pressed(): # als op knop A wordt gedrukt, gaan we de afstand meten
afstand = int(get_afstand())
display.scroll(afstand)
PIR-sensor met externe voeding gebruiken¶
Sommige PIR-sensoren (zoals de HC-SR505) werken niet altijd betrouwbaar op 3V.
In dat geval kun je een externe batterij gebruiken.
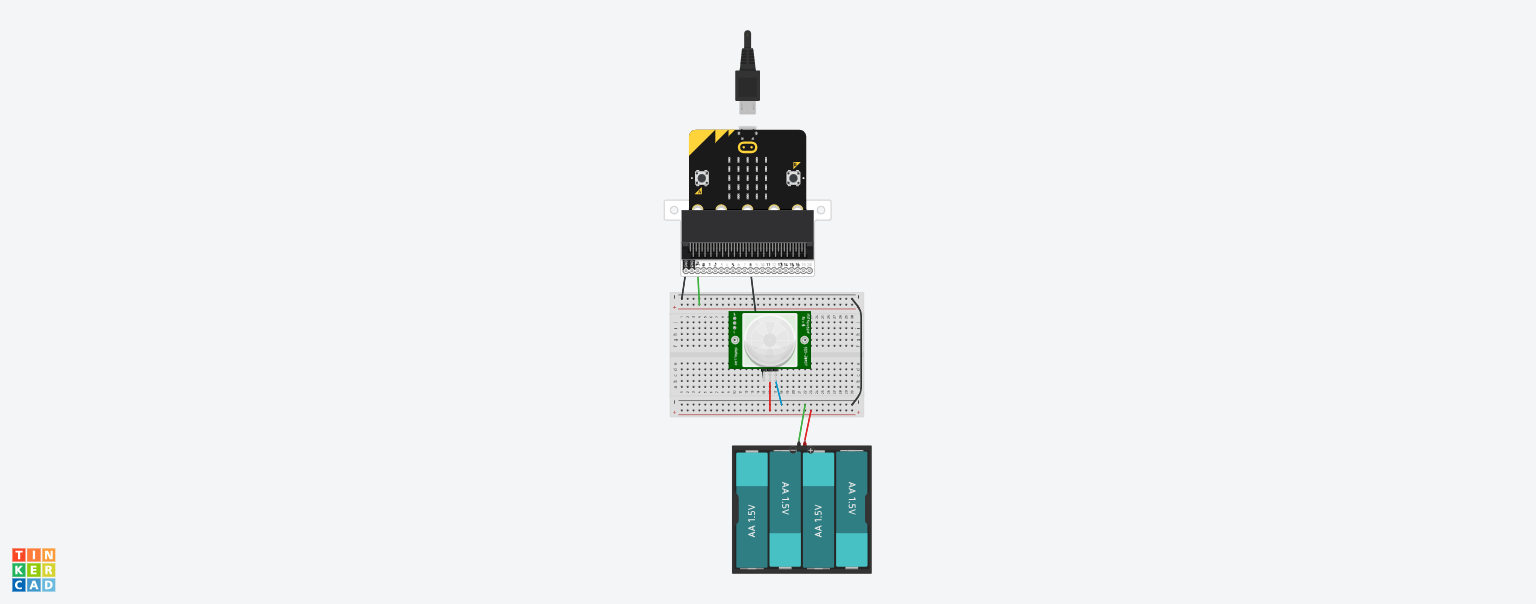
Aansluiten met externe voeding¶
Sluit de PIR-sensor zo aan:
VCC → externe batterij (+) (bijv. 3x AA ≈ 4.5V) GND → GND batterij én GND micro:bit OUT → P1
Belangrijk:
De GND van de batterij en de micro:bit moeten verbonden zijn
Anders kan de micro:bit het signaal niet goed lezen
Waarom moet GND gedeeld zijn?¶
De micro:bit meet spanning ten opzichte van GND.
Als de GND’s niet verbonden zijn:
krijgt de micro:bit geen stabiel signaal
werkt de sensor niet goed
PIR uitlezen (zelfde code)¶
De code verandert niet als je externe voeding gebruikt:
from microbit import *
# instellingen
PIR_SENSOR_PIN = pin1
BEWEGING = 1
GEEN_BEWEGING = 0
# programma
while True:
sensorwaarde = PIR_SENSOR_PIN.read_digital()
if sensorwaarde == BEWEGING:
display.show(Image.YES)
else:
display.clear()Let op bij hogere spanning
De uitgang (OUT) van de PIR is meestal: ongeveer 3.3V (veilig voor micro:bit)
Daarom kun je deze meestal direct aansluiten op een pin.
Gebruik geen 5V direct op een micro:bit pin.
Wanneer gebruik je externe voeding?
Gebruik een externe batterij als:
de sensor altijd 1 geeft
de sensor niet reageert
de sensor instabiel werkt
Kleurensensor VEML6040 gebruiken met de micro:bit¶
De VEML6040 RGBW Color Sensor Module is een kleurensensor die licht kan meten. De sensor kan vier verschillende waarden uitlezen:
R = rood
G = groen
B = blauw
W = wit / totale lichtsterkte
De sensor werkt via een communicatieprotocol dat we ook bij andere sensoren tegenkomen: I2C.
Met deze sensor kun je bijvoorbeeld:
kleuren herkennen
een lijnvolgende robot maken
lichtintensiteit meten
een sorteersysteem bouwen
onderzoeken hoe RGB-kleuren werken
Aansluiten van de sensor¶
De sensor heeft vier aansluitingen, die je op de micro:bit kunt koppelen:
VIN/VCC --> 3V (dus geen 6V!)
GND --> GND
SDA --> P20 (aan de zijkant van het breadboard)
SCL --> P19 (aan de zijkant van het breadboard)
SDA en SCL zijn de twee datalijnen van I2C. We gebruiken hiervoor dus 2 speciale pinnen, P19 en P20. Let er op dat de gaatjes van deze pinnen, en de gaatjes van de sensor, wat groter zijn dan je gewend bent, de stekkertjes blijven hierdoor minder goed vast zitten.
Hoe werkt I2C?¶
Bij I2C praten apparaten met elkaar via twee draadjes:
SDA → data
SCL → kloksignaal
De micro:bit is hierbij de “baas” (master). De sensor luistert als “slave”.
Iedere I2C-sensor heeft een eigen adres. De VEML6040 gebruikt standaard adres: 0x10 (hexadecimaal)
Controleren of de sensor werkt¶
Voordat we waarden uitlezen, controleren we eerst of de micro:bit de sensor ziet.
from microbit import *
while True:
print(i2c.scan())
sleep(1000)Zie je: [16], dan is de verbinding goed. Dit is namelijk gelijk aan 0x10. Hexadecimale getallen worden vaak gebruikt bij I2C-apparaten.
Sensor inschakelen¶
De VEML6040 staat standaard soms in een soort slaapstand. Daarom moeten we hem eerst aanzetten.
i2c.write(0x10, bytes([0x00, 0x00, 0x00]))RGBW-waarden uitlezen¶
De sensor bewaart de meetwaarden in zogenaamde registers. We lezen telkens 2 bytes uit een register.
| Register | Betekenis |
|---|---|
| 0x08 | Red |
| 0x09 | Green |
| 0x0A | Blue |
| 0x0B | White |
from microbit import *
ADDRESS = 0x10
def read16(register):
i2c.write(ADDRESS, bytes([register]))
data = i2c.read(ADDRESS, 2)
value = data[0] | (data[1] << 8)
return value
# VEML6040 inschakelen
# Register 0x00 = config
# 0x00, 0x00 betekent: sensor aan, normale meting
i2c.write(ADDRESS, bytes([0x00, 0x00, 0x00]))
sleep(100)
devices = i2c.scan()
display.scroll(str(devices))
while True:
red = read16(0x08)
green = read16(0x09)
blue = read16(0x0A)
white = read16(0x0B)
print("R:", red,
"G:", green,
"B:", blue,
"W:", white)
sleep(500)Wat betekenen de waarden?¶
De R, G en B geven de rode, groene en blauwe waarde aan van het licht. Je kunt kleuren herkennen door waarden met elkaar te vergelijken. Hoe hoger een bepaalde waarde, hoe meer de kleur die richting in gaat.
Omgevingslicht¶
De sensor meet licht. Dus:
zonlicht beïnvloedt de meting
afstand maakt uit
schaduw beïnvloedt de waarden
Daarom krijg je niet altijd exact dezelfde waarden.
De sensor zelf¶
De echte sensor is het kleine zwarte chipje midden op het printplaatje.
Richt dat chipje naar het object dat je wilt meten.
Geen waarden? Of zie je alleen nullen?
Controleer:
juiste pinnen?
P19 en P20 niet omgedraaid?
GND aangesloten?
sensor aangezet?
voldoende licht?